









X4L - wzmacniacz z DSP z serii X
Biznes „nagłośnieniowy” – w porównaniu z innymi dziedzinami techniki (np. przemysłem samochodowym, czy ...

Zakres słyszalnych (teoretycznie) przez człowieka częstotliwości mieści się w granicach 20 Hz-20 kHz – to chyba wie każdy. Każdy z nas też dobrze wie, że nikt nie wymyślił (i pewnie prędko nie wymyśli) pojedynczego przetwornika, który byłby w stanie pokryć równomiernie całe to pasmo, a przynajmniej przeważającą jego część, choćby 40 Hz-18 kHz.
Stąd systemy nagłośnieniowe składają się z kilku różnych głośników, z których każdy odpowiada za odtwarzanie dźwięków z zakresu „swojego” pasma – to również nic nowego. Idealnym, wiernie odtwarzającym sygnał, który doń wchodzi, jest system o równej jak stół charakterystyce amplitudowej i możliwie najbardziej liniowej charakterystyce fazowej. O ile jednak tego typu konstrukcje są mile widziane i świetnie sprawdzają się w studiach nagraniowych, o tyle w nagłośnieniu już niekoniecznie. Po pierwsze „bruździ” nam fizyka – tłumienie częstotliwości w powietrzu, tym większe im większa częstotliwość i odległość od źródła, sprawia, że chcąc nie chcąc musimy podbijać zakres najwyższych częstotliwości. Kolejnym powodem takiego zabiegu jest sumowanie się wiązek dźwiękowych emitowanych przez zestawy głośnikowe pracujące w większym klastrze, ale tylko w zakresie niskich i średnich częstotliwości, podczas gdy częstotliwości najwyższe – jako najbardziej kierunkowe – docierają w dane miejsce tylko z tej paczki, która „wycelowana” jest w to miejsce. I tak dalej, i tak dalej – przykładów takich można mnożyć. Jeśli dorzucimy do tego właściwości naszego słuchu (krzywe jednakowej głośności), jasnym się staje, czemu system idealnie liniowy nie sprawdzi się w dużym nagłośnieniu.
Osobna kwestia to dół pasma – tutaj nie tylko z powodu takich, a nie innych właściwości naszych uszu, ale też przez lata słuchania „łupania” dolnym zakresem po publice przyzwyczailiśmy się, że częstotliwości najniższe muszą „masować wnętrzności”. A żeby to uzyskać, nie możemy zagrać systemem, który będzie odtwarzał zakres 30-100 Hz z takim samym poziomem, jak częstotliwości środkowe. Tak więc pomimo tego, że mamy już obecnie systemy, które są w stanie zagrać niemalże w pełnym paśmie akustycznym, na dużych koncertach z muzyką rockową, dance’ową czy klubową, ale również i pop’ową nie obejdzie się bez wspomożenia systemu modułowego osobnymi subbasami.
I tutaj zaczynają się schody, bowiem subbas to taki „implant” w systemie, który nie jest z nim jednoznacznie zintegrowany. Gdy podwiesimy nasz system składający się z iluś tam modułów szerokopasmowych, to producent zadbał już o to, by wszystko było w nim odpowiednio zestrojone – bądź to robiąc go jako zamknięty system aktywny (np. Meyer Sound), bądź udostępniając odpowiednie presety dla swojego systemu, gdzie zadane są już odpowiednie parametry, jak częstotliwości podziału pasm i poziomy sygnału (aby odpowiednio ukształtować charakterystykę częstotliwościową), opóźnienia poszczególnych głośników (aby wyrównać je czasowo/fazowo), ograniczenia i zabezpieczenia itp. W najprostszym więc przypadku musimy system ustawić/podwiesić, wczytać odpowiedni preset i odpalić system. Oczywiście i na tym etapie można „wtopić”, np. źle dobierając czy ustawiając kąty, wczytując zły preset czy niepotrzebnie w nim grzebiąc (jeśli jest taka możliwość), no ale to już inny temat. W sytuacji idealnej przy niewielkim nakładzie pracy i nie będąc super- specjalistą w tym temacie możemy prawidłowo skonfigurować i zainstalować system nagłośnieniowy. Ale jeśli do tego dojdą nam subbasy, no to już nie jest tak „różowo”. Oczywiście można postawić je gdziekolwiek i jakkolwiek, ustawić crossover również „na oko” (albo i w ogóle nie krosować), podobnie i poziomy, i też będzie „kopało”. Ale… czy o to chodzi, aby swoją robotę robić „jakkolwiek” (choć niestety jest jeszcze sporo firm, które tak właśnie pracują)? Jeszcze gorzej, jak ktoś będzie miał chęci, ale braknie wiedzy, i będzie próbował zrobić coś, o czym bardzo nie ma pojęcia – np. ustawić basy w kardioidę czy „end fired”, po czym może się okazać, że, owszem, będą grały kierunkowo, ale…w stronę sceny albo w bok.
Temat dopasowania subwooferów do reszty systemu to temat rzeka i przymierza się do niego już od jakiegoś czasu znany wszystkim „ZiKE” (tak przynajmniej twierdzi, obiecując mi ów artykuł bodajże już od dwóch lat). Póki co jednak warto wspomnieć coś o tym temacie, choćby bardziej ogólnie. Z racji tego, że nie mogę poszczycić się choćby połową takiej wiedzy i doświadczenia, jak wspomniany „ZiKE”, skorzystałem z wiedzy i doświadczenia innych (plus własne), kompilując to w jeden artykuł, który – mam nadzieję – okaże się Wam pomocny.
Zadanie zestrojenia subwooferów z systemem szerokopasmowym wiąże się zazwyczaj z trzema podstawowymi kwestiami:
– relacją pomiędzy szerokościami pasm przetwarzanych przez subwoofer i system szerokopasmowy (podział pasma)
– relacją pomiędzy poziomem wyjściowym subwoofera i systemu szerokopasmowego (wzmocnienie)
– różnicami czasowymi w propagacji sygnału przez subwoofer i system szerokopasmowy (opóźnienie).
Zazwyczaj najwięcej trudności sprawia trzecie zagadnienie. Dlatego nim właśnie zajmiemy się w tym artykule.
Wyobraźmy sobie hipotetyczny system, w którym klaster szerokopasmowy przetwarza, w wyrównany sposób, pasmo 60 Hz-14 kHz (przyjmując standardowe kryterium -3 dB). Dodamy doń subwoofer, który będzie względem niego przesunięty, jeśli chodzi o ich wzajemną pozycję w przestrzeni. Subwoofer ten przetwarza częstotliwości powyżej 30 Hz. Krzywe odpowiedzi częstotliwościowych przedstawione są na rysunku 1. Jako zwrotnicę dzielącą pasmo w punkcie 100 Hz przyjmijmy filtr Linkwitz-Rileya czwartego rzędu.
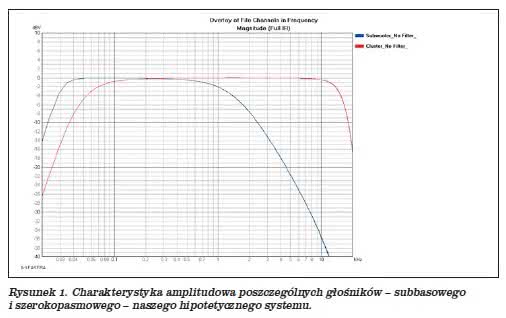
W subwooferze możemy zastosować filtr dolnoprzepustowy Linkwitz-Rileya czwartego rzędu, odcinający pasmo powyżej 100 Hz, ponieważ odpowiedź subwoofera w paśmie powyżej punktu podziału jest względnie wyrównana. Nie da się tak jednak postąpić w przypadku klastra szerokopasmowego. W rejonie punktu podziału bowiem jego odpowiedź częstotliwościowa wykazuje tendencję spadkową. W związku z tym należy użyć filtru elektrycznego, który, w połączeniu z naturalną odpowiedzią klastra, zapewni efekt akustyczny, równoważny z zastosowaniem filtru Linkwitz-Rileya czwartego rzędu, o częstotliwości granicznej 100 Hz.
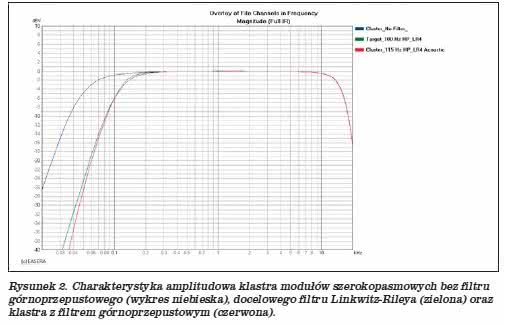
Na rysunku 2 przedstawiona jest charakterystyka naturalnej odpowiedzi klastra oraz docelowego filtru Linkwitz-Rileya, wraz z charakterystyką klastra po zastosowaniu filtru górnoprzepustowego. W celu uzyskania takiej charakterystyki zastosowany został górnoprzepustowy filtr Butterwortha trzeciego rzędu, z częstotliwością filtrowania 115 Hz. Bardziej dokładne dopasowanie można byłoby uzyskać poprzez użycie niższej częstotliwości podziału oraz parametrycznego korektora. Jednak charakterystyka przedstawiona na wykresie powinna być, jak na potrzeby naszych rozważań, w zupełności wystarczająca.
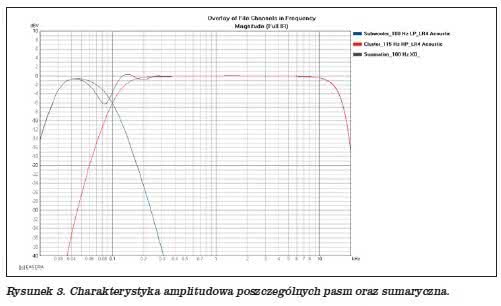
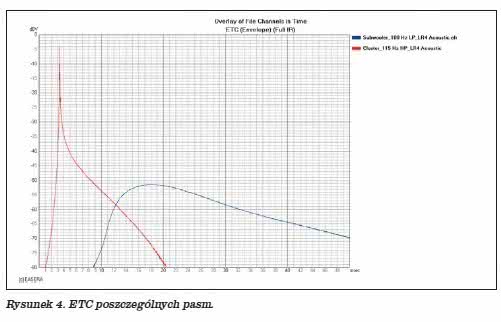
Gdy połączymy sygnały wyjściowe z dwóch urządzeń, otrzymamy odpowiedź przedstawioną na rysunku 3. Jednak w tym przypadku jest ona daleka od tej, którą zamierzamy uzyskać. Widać wyraźnie, że coś powoduje wycinanie fragmentu pasma. Wiemy, że zsumowana odpowiedź obu urządzeń, w których zastosowano akustyczny filtr Linkwitz- -Rileya, powinna być płaska. Ponieważ tak jednak nie jest, należy przyjąć, że przyczyną problemu jest niedopasowanie urządzeń w domenie czasu. Jeśli spojrzymy na wykresy ETC (ang. Envelope Time Curve – krzywa obwiedni czasowej) obu pasm przepustowych, przekonamy się, że rzeczywiście nie są one zsynchronizowane (rysunek 4). Musimy zatem opóźnić sygnał z klastra, ale o ile?
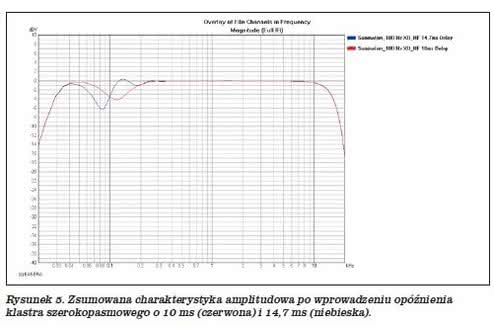
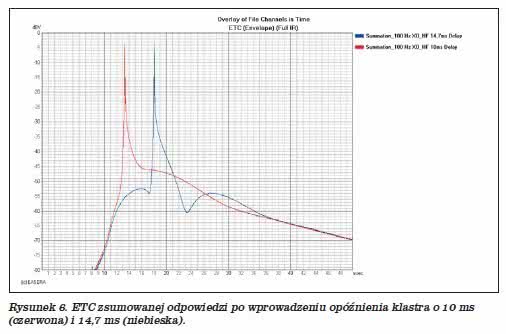
Chcąc zsynchronizować szczyt fali z klastra ze szczytem fali z subwoofera powinniśmy zastosować opóźnienie 14,7 ms. Inną opcją jest wyrównanie przednich krawędzi obu krzywych ETC. W takim przypadku opóźnienie powinno wynieść 10 ms. Uzyskane charakterystyki częstotliwościowe i czasowe przedstawiają wykresy na rysunkach 5 i 6. W żadnym z tych przypadków nie uzyskaliśmy sumarycznej odpowiedzi częstotliwościowej, którą moglibyśmy uznać za dobrą (względnie płaską). Z kolei wykres odpowiedzi w domenie czasowej pokazuje, że krótsze opóźnienie daje lepsze efekty, niż dłuższe. Badając różne wartości opóźnienia moglibyśmy spróbować uzyskać odpowiedź optymalną w obu domenach. Być może jednak istnieje lepszy sposób.
Podstawowy problem polega na tym, że dysponujemy tylko informacją o niskich częstotliwościach w przypadku subwoofera. Z równania Δt = 1/Δf , gdzie Δt to rozdzielczość w domenie czasu, zaś Δf oznacza rozdzielczość w dziedzinie częstotliwości, wynika, że wysoka rozdzielczość częstotliwościowa (mała wartość Δf) daje niską rozdzielczość czasową (duża wartość Δt). Aby móc określić właściwe opóźnienie sygnału pochodzącego od subbasu, musimy dysponować sygnałem z subwoofera o wyższej częstotliwości wyjściowej (odpowiadającej większej wartości Δf, niższej rozdzielczości częstotliwościowej, a więc wyższej rozdzielczości czasowej). O ile to możliwe, powinniśmy w tym celu obejść filtr dolnoprzepustowy w subwooferze, aby dostać więcej sygnału o wyższych częstotliwościach. W ten bowiem sposób łatwiej nam będzie zmierzyć dokładny czas dotarcia fali dźwiękowej z subwoofera. Załóżmy jednak, że nie możemy tak zrobić lub że mimo wszystko nie udało nam się uzyskać wystarczającej rozdzielczości czasowej.
Naszym celem jest znalezienie sposobu na uzyskanie precyzyjnej informacji czasowej, bez możliwości wykorzystania wyższych częstotliwości. Pozornie jest to niemożliwe, ale tylko wówczas, gdy ograniczymy się do domeny czasowej. Domena częstotliwościowa daje nam bowiem możliwość wystarczająco dokładnego pomiaru, by odnieść go do domeny czasu. Narzędziem tym jest opóźnienie grupowe, które matematycznie definiuje się jako ujemny stosunek szybkości zmian charakterystyki fazowej sygnału w odniesieniu do częstotliwości.
Tg = -dφ/dω
Rysunki 3 i 4 przedstawiają różne prezentacje (domeny) tego samego pomiaru indywidualnych pasm. Jeśli uważnie przyjrzymy się opóźnieniu grupowemu dla tych samych danych przedstawionemu na rysunku 7, będziemy mogli uzyskać wiele cennych informacji. Wysokoczęstotliwościowy limit każdej krzywej (czyli miejsce, gdzie wykres osiąga najniższą wartość i spłaszcza się) wskazuje czas dotarcia sygnału z danego urządzenia. Na wykresie widać więc, że w przypadku klastra wynosi on 3,3 ms. Wynik ten bardzo dokładnie koreluje z ETC z rysunku 4.
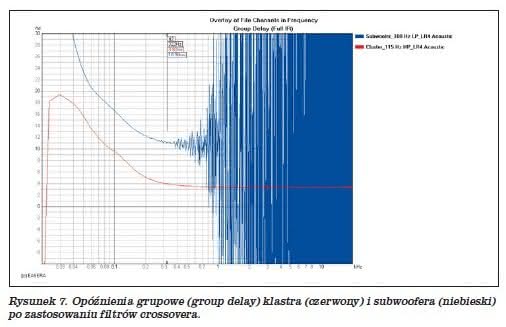
Kształt krzywej charakterystyki subwoofera w rejonie wyższych częstotliwości nie ma większego znaczenia. Wynika on bowiem z kiepskiego współczynnika sygnał/szum pomiarupowyżej 400 Hz. Patrząc na rysunek 3 widzimy wyraźnie, że już przy 200 Hz poziom sygnału z subwoofera wynosi -24 dB. W wyniku zastosowania filtru czwartego rzędu w okolicach 400 Hz spadek wynosi już -48 dB. Dlatego nie powinno nikogo dziwić, że w tym paśmie wartość SNR stanowi już pewien problem.
Wysokoczęstotliwościowy limit opóźnienia grupowego dla subwoofera możemy ocenić badając krzywą jego charakterystyki w okolicach 300 Hz. Widać, że wynosi ono około 11 ms. Z kolei opóźnienie grupowe dla klastra, przy częstotliwości 300 Hz, to 3,9 ms. To nieco więcej niż 3,3 ms dla wyższych częstotliwości. Różnica ta spowodowana jest przesunięciem fazowym filtru górnoprzepustowego oraz naturalną charakterystyką górnoprzepustową urządzenia. Filtr dolnoprzepustowy, zaaplikowany do sygnału subwoofera, ma podobne przesunięcie fazowe i, w konsekwencji, zbliżone różnice opóźnień grupowych, o ile tylko stosunek sygnał/szum pomiaru pozwoli na ich weryfikację.
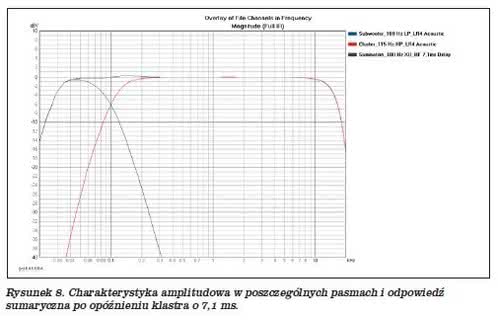
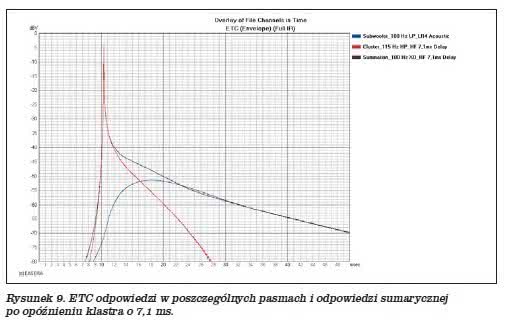
A zatem odejmując 3,9 ms od 11 ms otrzymujemy ostateczną wartość czasu, o jaki powinniśmy opóźnić sygnał z klastra. Daje to w efekcie sumowanie się poszczególnych pasm w taki sposób, jak przedstawiają to rysunki 8 i 9. Odpowiedź ta jest niemal dokładnie taka, jakiej oczekiwaliśmy. Mamy jedynie pomijalne odchylenie 0,5 dB w okolicach 150 Hz. Bierze się ono stąd, że charakterystyki odpowiedzi klastra i filtru górnoprzepustowego nie są idealnie dopasowane do charakterystyki docelowego filtru Linkwitz-Rileya (rysunek 2).
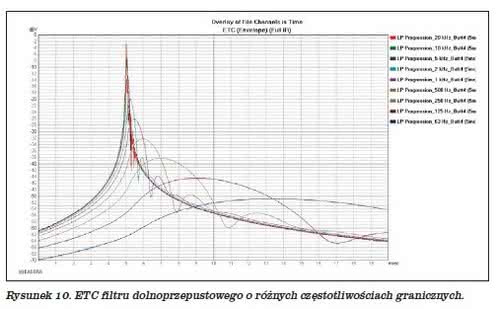
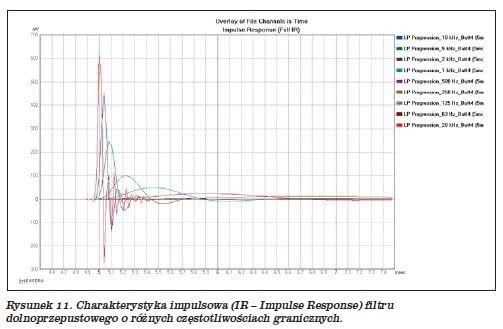
Istnieje jeszcze jedna kwestia, której rozważenie ułatwi, jak sądzę, zrozumienie wpływu odpowiedzi filtru dolnoprzepustowego na widoczne zmiany czasu, w jakim docierają fale dźwiękowe z subwoofera. Użyłem słowa „widoczne”, ponieważ wydaje się, że zmiany wywierają wpływ wyłącznie na ów czas. Na rysunkach 10 i 11 widzimy wykresy – odpowiednio – ETC oraz odpowiedź impulsową dolnoprzepustowego filtru Butterwortha czwartego rzędu. Jedyną cechą odróżniającą te wykresy jest częstotliwość graniczna (-3 dB) filtru. Rzeczywisty czas dotarcia dla wszystkich tych krzywych wynosi 5 ms. Jednak im niższa częstotliwość filtru, tym wykresy stają się mniej wyraziste – bardziej płaskie i „rozlazłe”, a punkt gdzie osiągają maksimum przesuwa się w kierunku coraz wyższych wartości (dla 500 Hz będzie to 6 ms, dla 250 Hz – 7 ms, a dla 125 Hz około 9 ms). Uzupełniający filtr górnoprzepustowy, z czasem dotarcia sygnału 5 ms, będzie więc idealnie współpracował z rzeczonym filtrem dolnoprzepustowym. Jeśli sygnał wyjściowy z tego filtru zostałby opóźniony ponad owe 5 milisekund, wówczas pojawiłyby się błędy sumacji sygnałów z obu filtrów, uwidocznione na rysunkach 5 i 6.
Przekonaliśmy się, w jaki sposób można uzyskać żądaną odpowiedź (wyrównanie) połączonego sygnału poprzez połączenie odpowiedzi filtru elektrycznego z odpowiedzią głośnika. Zobaczyliśmy też, że określone zachowanie się danego urządzenia dolnoprzepustowego (subwoofera) może sprawić, iż czas dotarcia sygnału wydaje się być dłuższy, niż rzeczywiście jest. Pokazaliśmy także jak, przy użyciu opóźnienia grupowego i ze względnie wysoką precyzją, wyliczyć właściwe opóźnienie sygnału, w sytuacji gdy możliwości przetwarzania wysokich częstotliwości przez urządzenie są ograniczone, a to z uwagi na jego niskoprzepustową naturę. I choć do wyrównywania czasowego subwooferów z „górkami” przeważnie stosuje się metodę „sklejania” fazy, to metoda opisana powyżej, korzystająca z odczytu opóźnienia grupowego, może być równie pomocna, a dla niektórych może nawet łatwiejsza. Polecam wypróbowanie jej – oczywiście w spokojnych warunkach.
Piotr Sadłoń


{kind=link}
{kind=link}
{kind=link}